福建XYZ三軸直交機械手模具廠家
直交機械手的發(fā)展趨勢與創(chuàng)新方向:隨著科技的不斷進步,直交機械手正朝著智能化、輕量化、高速化與高精度化的方向發(fā)展。在智能化方面,引入人工智能技術(shù),使機械手能夠根據(jù)生產(chǎn)環(huán)境的變化自動調(diào)整運動策略,實現(xiàn)自主決策與智能操作。輕量化設(shè)計則通過采用新型強度高、低密度材料,在保證機械結(jié)構(gòu)剛性的前提下,降低機械手的整體重量,提高其運動靈活性與能源利用效率。高速化與高精度化的發(fā)展趨勢,要求不斷優(yōu)化驅(qū)動系統(tǒng)與控制算法,提升電機的響應(yīng)速度與定位精度,滿足日益增長的高效、精密生產(chǎn)需求。此外,模塊化設(shè)計也是未來的創(chuàng)新方向之一,通過將機械手的各個功能模塊進行標準化設(shè)計,方便用戶根據(jù)實際需求進行靈活組合與定制,進一步拓展直交機械手的應(yīng)用領(lǐng)域。 食品行業(yè),直交機械手嚴守衛(wèi)生標準,安全搬運!福建XYZ三軸直交機械手模具廠家

直交機械手作為自動化生產(chǎn)線上的重要執(zhí)行部件,與自動化系統(tǒng)緊密融合,極大地提升了生產(chǎn)的自動化水平。在自動化生產(chǎn)線中,直交機械手可與各類自動化設(shè)備,如自動化倉儲系統(tǒng)、自動檢測設(shè)備、自動化裝配設(shè)備等無縫對接。通過自動化控制系統(tǒng)的統(tǒng)一調(diào)度,機械手能夠根據(jù)生產(chǎn)流程的需求,自動完成物料的搬運、加工部件的上下料以及產(chǎn)品的裝配等任務(wù)。例如,在3C產(chǎn)品的自動化生產(chǎn)車間里,直交機械手從自動化倉儲系統(tǒng)中取出零部件,搬運至裝配設(shè)備進行準確裝配,再將完成裝配的半成品移送至檢測設(shè)備進行質(zhì)量檢測,整個過程一氣呵成,無需人工干預。這種高度自動化的生產(chǎn)模式,不僅提高了生產(chǎn)效率,還能實現(xiàn)24小時不間斷生產(chǎn),有效降低了生產(chǎn)成本,增強了企業(yè)在市場中的競爭力,推動了制造業(yè)向智能化、自動化方向邁進。 貴州懸臂型重負載直交機械手定制服務(wù)檢測任務(wù)交給直交機械手,準確檢測,發(fā)現(xiàn)問題,迅速解決!
直交機械手與工業(yè)的融合發(fā)展:工業(yè)強調(diào)智能制造和數(shù)字化轉(zhuǎn)型,直交機械手在這一發(fā)展浪潮中扮演著關(guān)鍵角色,與工業(yè)理念深度融合。通過物聯(lián)網(wǎng)技術(shù),直交機械手可以實時連接到生產(chǎn)網(wǎng)絡(luò)中,實現(xiàn)設(shè)備之間的數(shù)據(jù)共享和互聯(lián)互通。其運行狀態(tài)、工作參數(shù)、故障信息等都能實時傳輸?shù)缴a(chǎn)管理系統(tǒng),便于管理人員進行遠程監(jiān)控和故障診斷,提高設(shè)備的維護效率和生產(chǎn)的穩(wěn)定性。同時,借助大數(shù)據(jù)分析和云計算技術(shù),對機械手的運行數(shù)據(jù)進行深入分析,優(yōu)化運動軌跡和生產(chǎn)流程,實現(xiàn)生產(chǎn)過程的智能化優(yōu)化。此外,直交機械手與其他智能設(shè)備協(xié)同工作,構(gòu)建起高度自動化、智能化的生產(chǎn)系統(tǒng),推動工業(yè)生產(chǎn)向智能化、柔性化方向邁進,助力企業(yè)在工業(yè)時代提升競爭力。
直交機械手的基本原理:直交機械手作為工業(yè)自動化的關(guān)鍵設(shè)備,其工作原理基于直角坐標系。通過X、Y、Z軸的單獨運動組合,實現(xiàn)準確的三維空間定位。以常見的螺桿型直交機械手為例,它主要由螺桿傳動系統(tǒng)、導軌、控制系統(tǒng)與執(zhí)行機構(gòu)構(gòu)成。螺桿傳動系統(tǒng)利用螺桿和螺母的配合,將電機的旋轉(zhuǎn)運動轉(zhuǎn)化為直線運動,以此驅(qū)動機械手沿水平或垂直方向平穩(wěn)移動。導軌則為機械手的運動提供穩(wěn)定支撐與導向,保證運動的精度和直線度。控制系統(tǒng)如同機械手的“大腦”,精確調(diào)控各軸的運動軌跡、速度及加速度,從而實現(xiàn)對工件的精確抓取、搬運與放置等操作。這種基于直角坐標的運動方式,使直交機械手能夠在復雜的工業(yè)環(huán)境中高效、準確地完成各類任務(wù)。 聯(lián)軸結(jié)構(gòu)設(shè)計,讓直交機械手維護簡便,降低成本,豈不妙哉?
直交機械手的工作原理基于電機驅(qū)動和機械傳動。常見的驅(qū)動方式有伺服電機、步進電機等,它們通過皮帶、絲杠、齒輪等傳動機構(gòu)將旋轉(zhuǎn)運動轉(zhuǎn)化為直線運動。以絲杠傳動為例,電機帶動絲杠旋轉(zhuǎn),與絲杠配合的螺母則沿著絲杠軸線方向做直線移動,進而帶動安裝在螺母上的機械手部件運動。在這個過程中,控制系統(tǒng)會根據(jù)預設(shè)的程序和指令,精確控制電機的轉(zhuǎn)速、轉(zhuǎn)向和運行時間,從而實現(xiàn)機械手在X、Y、Z軸方向上的精確位移和定位。同時,傳感器實時監(jiān)測機械手的位置和運動狀態(tài),并將信息反饋給控制系統(tǒng),以便及時調(diào)整控制參數(shù),保證機械手的運動精度和穩(wěn)定性。這種閉環(huán)控制的工作方式使得直交機械手能夠適應(yīng)復雜的工作任務(wù)和高精度的操作要求。 貼片工作里,直交機械手準確貼片,位置無誤,保障生產(chǎn)!廣東懸臂型重負載直交機械手廠家
物流行業(yè)里,直交機械手按時搬運貨物,加快物流周轉(zhuǎn)!福建XYZ三軸直交機械手模具廠家
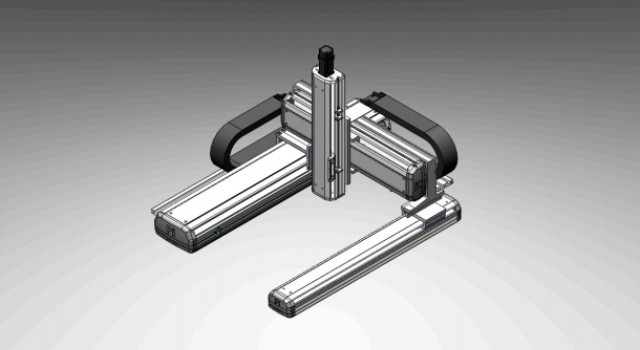
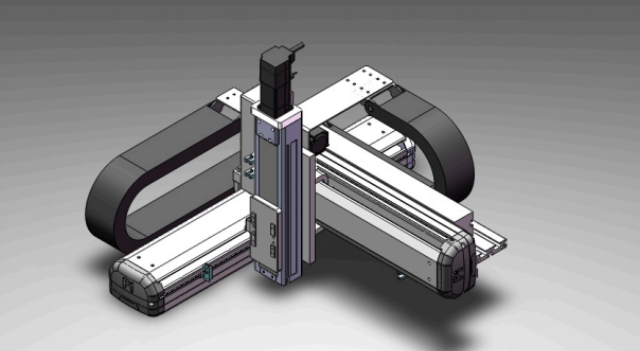
直交機械手通常由X、Y、Z三個軸組成,通過這三個軸的協(xié)同運動,實現(xiàn)機械手在三維空間內(nèi)的精確定位。其結(jié)構(gòu)設(shè)計遵循直角坐標系原理,各軸相互垂直,使得運動路徑清晰、簡單,便于編程與控制。以常見的懸臂式直交機械手為例,X軸一般負責水平方向的左右移動,Y軸實現(xiàn)前后位移,Z軸則完成垂直方向的升降動作。這種結(jié)構(gòu)設(shè)計使得機械手能夠靈活地在工作區(qū)域內(nèi)穿梭,準確地到達目標位置,廣泛應(yīng)用于各類自動化生產(chǎn)線,如電子制造中的元件貼片、機械加工中的物料搬運等場景,為高效生產(chǎn)提供了基礎(chǔ)保障。直交機械手的構(gòu)造包含多個關(guān)鍵組件。滾珠絲桿是實現(xiàn)高精度直線運動的重要部件,它將回轉(zhuǎn)運動轉(zhuǎn)化成直線運動或?qū)⒅本€運動轉(zhuǎn)化為回轉(zhuǎn)運動,具有高精度、高效率、高剛性等特點。直線導軌則為機械手的運動提供精確導向,保證運動的平穩(wěn)性和重復性,能有效承受來自不同方向的載荷。強度高的鋁合金型材構(gòu)成了機械手的框架主體,其質(zhì)量輕、強度高,既降低了整體重量,利于提高運動速度,又確保了結(jié)構(gòu)的穩(wěn)定性。此外,聯(lián)軸器用于連接電機與絲桿等部件,傳遞扭矩,保障動力的有效傳輸,這些組件協(xié)同工作,賦予了直交機械手良好的性能。 福建XYZ三軸直交機械手模具廠家
- 上海高精度電動缸 2025-09-17
- 江蘇直流電動缸工廠 2025-09-17
- 吉林精密驅(qū)動電動缸模組 2025-09-17
- 云南極座標型重負載直交機械手模組 2025-09-17
- 海南直交機械手價格 2025-09-17
- 上海懸臂型重負載直交機械手定制服務(wù) 2025-09-17
- 陜西龍門型重負載直交機械手多少錢 2025-09-17
- 河北螺桿型直交機械手多少錢 2025-09-16
- 貴州懸臂型重負載直交機械手定制服務(wù) 2025-09-16
- 珠海封閉式模組開發(fā) 2025-09-16
- 安徽微型超聲波端子機服務(wù)熱線 2025-09-17
- 浙江二手井式滲碳爐性能 2025-09-17
- 浙江立式研磨機哪里好 2025-09-17
- 福建冷庫工廠 2025-09-17
- 余杭區(qū)直流變頻冷暖水機誠信合作 2025-09-17
- 常州ERP智能倉儲系統(tǒng)哪家好 2025-09-17
- 寧波平面貼標機一般多少錢 2025-09-17
- 鄭州大功率熱風機報價 2025-09-17
- 湖北全自動行走減速機 2025-09-17
- 南京鍍鎳表面處理鍍鎳服務(wù) 2025-09-17