重慶視頻傳輸技術
內河運輸是我們國內長途運輸的重要方式之一,通過連接南北東西的內河通道,能夠低成本運輸大型貨物。隨著現代化智能化建設的深入,如今的運輸船都有這監控視頻實時監視的需求,一方面,貨物所有者可以通過遠程監控實時查看自己貨物的狀態,有無損壞被盜等情況;另一方面,運輸承擔方,也需要監控數據為自己的工作作保障,一方出現意外而沒有證據證明的情況,同時實時查看貨倉情況也是剛需。在這兩者需求的共同驅使下,大量的轉臺、監控設備等“上船”。但是,這也面臨一個嚴峻的考驗,大量的監控設備所占用的帶寬是船內設備無法滿足的,由于不少內河通道遠離村莊、信號塔,導致網絡欠佳,只有2G甚至無網的狀態,給監控視頻流的實時傳輸帶來了困難。LLSM低延遲低帶寬流媒體傳輸模塊能夠用于機器人領域!重慶視頻傳輸技術
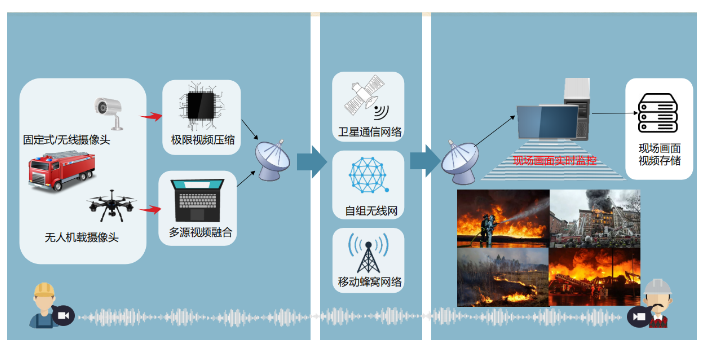
視頻壓縮與傳輸
對于機器人的未來發展而言,靈活性的提升是下一個方向。當下的機器人頭部產品中無論是宇樹科技還是特斯拉的,都多多少少面臨這個問題。機器人控制模塊的發展直接決定著遠程控制機器人進行工作時的延遲,進而展現出不同的靈活程度。LLSM低延遲低延遲低帶寬流媒體傳輸模塊,模塊基于RK3588圖像傳感器,植入GS遠程可視化低延時實時控制系統,采用自研軟解技術以及單向視頻傳輸和雙方指令交互的裝備,系統硬件只需1個前端視頻服務器。當SDI視頻≤4路時,硬件模塊(或板卡)尺寸小、功耗低。同時顯控終端不需額外的解碼硬件。重慶視頻傳輸技術視頻壓縮不一定會影響視頻的畫質。
山火火勢以及生成的濃煙,使得許多地方信號薄弱,無人機飛進去可能失去信號,如果控制段靠近山火則會受到影響,這是一個兩難的困境。面臨這種困境,有一種辦法是通過減少無人機帶寬占用的方法,提升無人機控制距離,以及在若望環境下的控制能力。成都慧視利用窄帶打造的GS遠程可視化低延遲實時控制系統,利用視頻編碼技術進行高并行低時延壓縮加速,實現交互式視頻流。在普通顯卡硬件基礎上,利用自主知識產權實現性能優化。在小帶寬只需600Kbps的環境下,控制端低時延交互式控制,本系統時延(從光信號開始到顯示)低于60毫秒(不含網絡傳輸時延)。
針對于這樣的難點,成都慧視在RK3588圖像處理平臺的基礎上內置遠程可視化低延遲實時控制系統,定制開發了LLSM低延遲低帶寬流媒體傳輸模塊,模塊能夠實現在500K帶寬條件下以50ms左右的低延遲實時控制多個無人巡邏車。這樣低帶寬、低延遲條件下的無人巡邏車,控制中心只需要少量的帶寬就能實時接收多個無人車回傳的數據,而不會出現帶寬擁堵等問題,并且能夠更穩定的進行遠距離作業,到達許多人工無法到達或者有安全風險的區域。此外,RK3588圖像處理板還能夠賦予無人巡邏車鎖定跟蹤的能力。當指定區域闖入入侵者,無人巡邏車能夠立即識別,并鎖定跟蹤其動向,實時向控制中心發送位置,成為人工巡邏體系的有力補充,助力打造24小時無間歇安防。視頻的高效壓縮能夠減少存儲視頻所需空間。

雖然有這么多的優勢,但是消防無人機也有許多難點需要突破,首先就是消防人員需要在相對安全區域對無人機進行遠程控制,因此通信和網絡帶寬必須得到保障。但實際情況中卻并不理想,煙霧對通信帶寬的影響非常明顯,存在帶寬波動較大、控制延遲增加的問題,給消防無人機滅火帶來了諸多難題。針對于無人設備面臨的這些問題,慧視低延遲低延遲遠程可視化圖傳控制模塊應運而生,裝備該模塊后可以達到如下效果:1.窄帶低延遲遠程可視化控制模塊可以有效降低通信帶寬,例如單路1080P的高清圖像通常需要4M帶寬,但是經過成都慧視光電技術有限公司的HE-030模塊(基于RK3588的圖像處理板),可以實現以500K的帶寬進行視頻和控制信號同步輸出,帶寬雖然只有原來的八分之一,但是視頻質量只會下降3.5個百分點左右,不會出現花屏、馬賽克、黑屏等現象。2.延遲時間極大降低,相機延遲+圖像處理板編碼+數據鏈+地面軟解碼的總延遲時長控制在100ms以內。3.因為地面入口通信帶寬降低,一個消防人員可以同時控制多架無人機進行現場滅火,極大提升滅火的效率。LLSM低延遲低帶寬流媒體傳輸模塊能夠用于無人船領域!重慶視頻傳輸技術
LLSM低延遲低帶寬流媒體傳輸模塊。重慶視頻傳輸技術
2025將是低空經濟飛躍發展的一年,無論是行業技術還是國家政策,都將在這一年陸續出現。隨著應用場景的不斷增多,對于無人飛行器的要求也越來越高,執行單純飛行任務的無人機將會越來越少,更多的是需要無人機進行更多的“無人化”AI工作。也就是讓無人機朝著自主化飛行、作業等方向走。雖然在5G大環境下,我們會減少很多帶寬焦慮,但是在一些特定領域,考慮到網絡環境、成本等問題,降低帶寬資源占用仍是一項關鍵工作。在低空經濟的無人機巡檢、應急救援、交通執法、邊海防等領域,帶寬不足往往會帶來視頻花屏、傳輸卡頓、影響無人飛行器的飛行距離等問題,給工作帶來諸多不便。如果為了穩定傳輸而增加帶寬,又會帶來成本增加的苦惱。重慶視頻傳輸技術
- 四川圖像處理板推廣 2025-09-17
- 吉林靠譜的圖像處理板 2025-09-17
- 靠譜的圖像處理板應用 2025-09-17
- 可靠圖像處理板功效 2025-09-17
- 貴州高清視頻壓縮與傳輸供應商 2025-09-17
- 可靠圖像處理板零售價格 2025-09-17
- 吉林圖像處理板設計 2025-09-17
- 青海圖像處理板工藝 2025-09-17
- 可靠圖像處理板大概價格多少 2025-09-17
- 海南圖像處理板銷售廠家 2025-09-17
- 傳感器 壓力傳感器 2025-09-17
- 硚口區新一代企業通信軟件開發五星服務 2025-09-17
- 武漢安全防爆手機價格 2025-09-17
- 延慶區信息化AI交互式學習機優勢 2025-09-17
- 常州低壓線物聯網設備批發廠家 2025-09-17
- 坪山智慧環衛監管 2025-09-17
- 國產高精度RGS 9000GPS模擬器方案商 2025-09-17
- 徐州智能化智慧園區網絡覆蓋設備質檢 2025-09-17
- 青島企業設備管理系統 2025-09-17
- 蘇州5G隨身WIFI哪款好用 2025-09-17