工具開源智造
格物斯坦與上海大學、清華大學共建“清華-上大機器藝術與具身智能實驗室”,由上海大學副教授葉林奇領銜,聚焦具身智能、機器人運動控制與仿真技術的前沿研究。該實驗室開發的“格物”具身智能仿真平臺成為標志性成果——通過集成通用強化學習框架與模型自動化適配技術,實現“一套代碼適配百余款機器人”,新機型導入即可訓練,無需重復編程,徹底顛覆傳統研發流程。復旦大學亦深度參與技術驗證,其自主研制的“光華一號”人形機器人依托該平臺優化運動算法,將行走、抓取等功能的開發周期從3個月壓縮至數天。此外,平臺與UnityRLPlayground開源框架的融合,進一步降低了開發門檻,支持從仿真訓練到實體部署的全流程自動化。格物斯坦開源藍牙模塊支持多機協作,如群控機器人舞蹈編隊。工具開源智造
格物斯坦機器人金屬開源產品的材料主要是結構精細的鋁合金構件:采用工業級鋁合金材料,支持快速拆裝,結構件公差精度可達0.01mm,在使用過程中可確保機械穩定性。且其結構件為六面拼搭設計:兼容樂高式積木體系,同時支持舵機、傳感器等模塊的自由擴展,可構建從簡單機械臂到多自由度仿生機器人(如仿生蛇、仿生犬)的復雜形態。空間自由度優化:仿生機器人關節支持多自由度運動(如四足機器人達12自由度),模擬生物步態與動態平衡。工具開源智造GLP圖形化軟件拖拽指令塊,一鍵轉譯C語言代碼,降低學習門檻。
開源這些控制器的優勢在于教育適配性與技術開放性的統一:認知分層設計:從點讀筆的物理交互到ROS的代碼開發,形成“無屏→實體卡→圖形化→代碼化”的漸進路徑,匹配兒童思維從具象到抽象的發展規律;軟硬件深度協同:以GC-500為例,其內置的GScratch軟件基于Scratch 2.0深度優化,新增硬件交互模塊腳本,學生拖拽“超聲避障”“舵機角度”等積木即可控制機器人行為,同時支持圖形代碼一鍵轉譯為Arduino C語言,實現從趣味編程到工程開發的無縫躍遷;工業級擴展能力:GC-600控制器提供I2C、UART、GPIO等標準接口,可驅動多自由度仿生關節(如12自由度仿生犬),并兼容第三方傳感器與執行器,使中學生能開發“林火監測無人機”“腦電波控制機械臂”等復雜項目,將創客想法快速轉化為工業級原型;跨平臺生態整合:控制器適配格物斯坦的六面拼搭金屬結構件(公差精度0.01mm),結合開源社區共享的3D模型與代碼庫,學生可復用“全自動象棋機器人”等成熟方案,聚焦創新優化而非重復造輪,真正踐行“創造無圍墻”的理念。
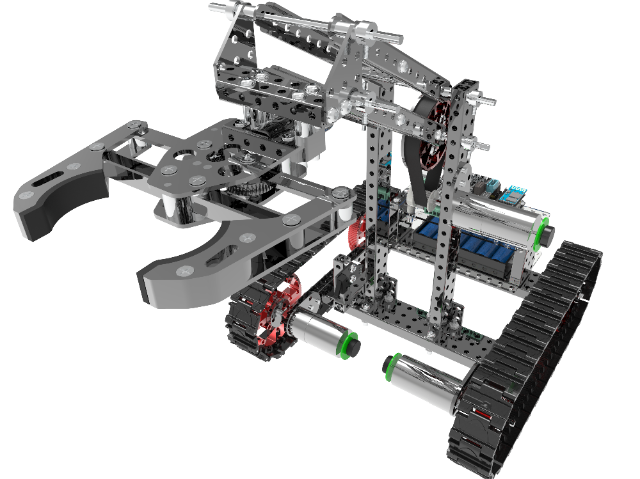
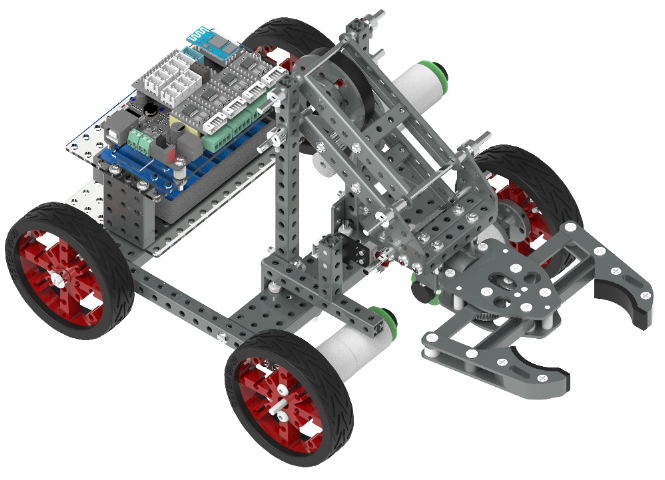
格物斯坦機械手臂采用**度鋁合金結構件,通過超精密加工技術實現0.01毫米公差精度,確保機械臂在高速運動中的穩定性和耐久性。其關節模塊搭載高扭矩舵機(扭矩范圍0.15-20kg·cm),支持多自由度運動(如六軸協同),并預留標準化接口(I2C、UART、GPIO),兼容超聲測距、紅外巡線、溫濕度傳感器等300余種電子模塊,以及第三方執行器如氣動機械爪。**控制器GC-500/GC-600系列集成藍牙4.0模塊,支持手機App遙控(如“你畫我跑”軌跡生成、語音指令交互),同時深度兼容ROS(Robot Operating System)開發套件。這一設計使學生可直接調用ROS中的運動控制API、傳感器驅動庫及OpenCV視覺算法,用Python/C++編寫自主導航程序,實現從仿真到實體硬件的無縫遷移。硬件預留I2C、UART等接口,可連接300余種電子模塊實現功能擴展。
開源系列產品的跨學科整合:結合3D打印課程,定制非標結構件(如輕量化仿生腿),優化機器人動態性能;“腦電波控制積木車”實驗將專注力轉化為前進指令,應用于特殊教育場景。高等教育與科研仿生機器人開發:高校團隊基于“格物”仿真平臺預演雙足機器人Tinker的運動策略,再部署至實體硬件驗證抗風壓能力(模擬八級強風);通過調整關節參數(如腿長、偏轉角度),探索四足機器人Go2的極限負重(50公斤)與跳躍穩定性。人工智能融合:基于ROS開發“多機協作流水線”,實現機器人群體任務分配與避障算法;集成YOLO目標檢測模型,賦予機械臂動態抓取能力(如分揀快遞包裹)。電子積木模塊實現電路入門,結合微型機床培養“數字匠人”技能。工具開源智造
開源技術降低了創業門檻,讓創新更普惠??。工具開源智造
關于金屬開源系列課程——低齡段(10-13歲) 以 Gbot機器人課程 為起點,學生通過36課時的項目實踐,從Scratch圖形化編程切入硬件交互。例如,在“螳螂機器人”項目中,學生需設計多關節機械結構,結合巡線傳感器與超聲模塊實現動態避障;而“智能伸縮門”項目則要求學生運用限位開關與藍牙模塊,調試電機扭矩與齒輪傳動系統,理解物理信號到數字指令的轉換邏輯。課程同步引入 GScratch軟件,支持圖形化指令一鍵轉譯為Arduino C代碼,為高階開發架設橋梁。工具開源智造
- 江蘇線下stem教育排行榜 2025-09-17
- 放心選編程培訓 2025-09-17
- ChatGPT編程啟蒙 2025-09-17
- STEM人工智能市場規模 2025-09-17
- 圖形化積木搭建 2025-09-17
- 浙江更好的機器人教育師資培訓 2025-09-17
- 青少年人工智能機器人編程 2025-09-17
- 比較好的創客實驗室內容 2025-09-17
- 機器人基地 2025-09-17
- 放心選人工智能哪些優勢 2025-09-17
- 上海ai伴讀性價比 2025-09-17
- 溧陽本地體育類培訓包括什么 2025-09-17
- 上海黃浦區盧灣一中心小學轉學怎么操作 2025-09-17
- 揭陽藝術生高三補習藝術生文化課 2025-09-17
- 江寧區企業管理咨詢服務哪家好 2025-09-17
- 淄博四中藝考美術特長班 2025-09-17
- 楊浦區企業管理咨詢服務 2025-09-17
- 河南學開鎖需要多少錢 2025-09-17
- 江蘇線下stem教育排行榜 2025-09-17
- 深圳太極拳一節課多少錢 2025-09-17