專業(yè)級(jí)角度偏差測(cè)量?jī)x使用方法
汽車制造-動(dòng)力總成裝配線場(chǎng)景需求:多臺(tái)伺服電機(jī)同步驅(qū)動(dòng)變速箱裝配機(jī)器人,需實(shí)時(shí)監(jiān)控各電機(jī)角度偏差,避免齒輪嚙合不良導(dǎo)致的噪音與壽命縮短。方案實(shí)施:部署12臺(tái)SYNERGYS測(cè)量?jī)x,通過(guò)時(shí)間同步模塊(PTP協(xié)議)確保數(shù)據(jù)采集精度<1ms。EMS平臺(tái)實(shí)時(shí)對(duì)比各電機(jī)角度曲線,當(dāng)角度差>±°時(shí),系統(tǒng)自動(dòng)調(diào)整機(jī)器人運(yùn)動(dòng)軌跡,將變速箱裝配精度從±°提升至±°,異響發(fā)生率降低70%。2.半導(dǎo)體-晶圓傳輸系統(tǒng)場(chǎng)景需求:潔凈室環(huán)境下,晶圓機(jī)械臂需在-20℃~40℃寬溫域內(nèi)保持角度定位精度±°,以避免晶圓破損。方案實(shí)施:測(cè)量?jī)x集成高精度NTC熱敏電阻(精度±℃)與紅外溫度傳感器,實(shí)時(shí)修正熱膨脹導(dǎo)致的角度偏差。EMS平臺(tái)通過(guò)數(shù)字孿生模型模擬不同工況下的機(jī)械臂運(yùn)動(dòng),**角度超調(diào)風(fēng)險(xiǎn),使晶圓破損率從降至。 ASHOOTER角度偏差測(cè)量輕量化儀、重量 0.8kg,高空作業(yè)攜帶無(wú)負(fù)擔(dān)。專業(yè)級(jí)角度偏差測(cè)量?jī)x使用方法
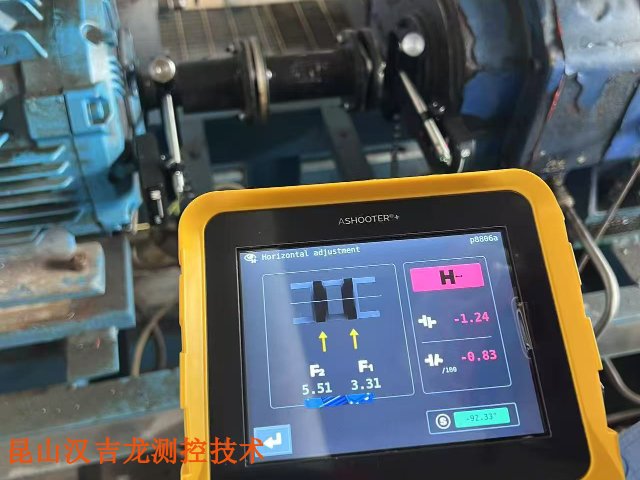
ASHOOTER角度偏差測(cè)量校準(zhǔn)儀具有邊測(cè)邊校的雙功能,能夠有效提升設(shè)備精度,以ASHOOTER-AS500激光對(duì)中儀為例,其相關(guān)介紹如下:精細(xì)測(cè)量:搭載高分辨率,配合30mmCCD探測(cè)器,可實(shí)現(xiàn)微米級(jí)的精細(xì)檢測(cè)。內(nèi)置數(shù)字傾角儀的無(wú)線傳感器,可實(shí)時(shí)獲取設(shè)備傾斜角度數(shù)據(jù),結(jié)合動(dòng)態(tài)校準(zhǔn)算法,確保測(cè)量結(jié)果不受環(huán)境干擾。智能分析與實(shí)時(shí)校正:儀器配備右/左三維視圖及翻轉(zhuǎn)功能,通過(guò)可視化的3D界面,將設(shè)備對(duì)中狀態(tài)直觀呈現(xiàn)。水平調(diào)整時(shí)提供實(shí)時(shí)墊片計(jì)算,垂直校正時(shí)自動(dòng)生成調(diào)整量建議,操作人員在調(diào)整設(shè)備過(guò)程中,可即刻獲取反饋,實(shí)現(xiàn)“邊調(diào)邊測(cè)”,減少人為誤差。此外,ASHOOTER系列的部分其他型號(hào)也具備類似的邊測(cè)邊校功能,如ASHOOTER便攜激光軸同心度檢測(cè)儀,開(kāi)機(jī)后3秒內(nèi)即可完成自檢并進(jìn)入測(cè)量狀態(tài),配備磁吸式測(cè)量支架,安裝定位時(shí)間縮短至2分鐘以內(nèi),支持一鍵校準(zhǔn)功能,測(cè)量數(shù)據(jù)可通過(guò)藍(lán)牙實(shí)時(shí)傳輸至手機(jī)、平板或電腦,方便操作人員根據(jù)數(shù)據(jù)及時(shí)進(jìn)行校準(zhǔn)調(diào)整。 專業(yè)級(jí)角度偏差測(cè)量?jī)x使用方法漢吉龍SYNERGYS角度偏差測(cè)量?jī)x精確捕捉角度偏移。

動(dòng)態(tài)補(bǔ)償算法架構(gòu)雙模型協(xié)同修正:靜態(tài)熱膨脹模型:基于公式ΔL=α×L?×ΔT,計(jì)算溫度變化ΔT引起的長(zhǎng)度變化ΔL,修正激光路徑長(zhǎng)度。例如,當(dāng)溫度從20℃升至50℃時(shí),1米鋼軸的熱膨脹量約為,系統(tǒng)自動(dòng)調(diào)整激光干涉條紋計(jì)數(shù)。動(dòng)態(tài)熱變形模型:通過(guò)有限元仿真預(yù)建模,模擬不同溫度梯度下設(shè)備結(jié)構(gòu)的形變趨勢(shì)。例如,在高溫環(huán)境中,設(shè)備基座的熱變形可能導(dǎo)致激光發(fā)射器傾斜,系統(tǒng)通過(guò)內(nèi)置傾角傳感器(精度±°)實(shí)時(shí)修正光路角度。卡爾曼濾波降噪:結(jié)合振動(dòng)傳感器數(shù)據(jù)(),濾除溫度波動(dòng)引起的高頻噪聲干擾,確保補(bǔ)償后的角度偏差波動(dòng)<±°。3.硬件級(jí)熱穩(wěn)定性設(shè)計(jì)低膨脹材料選型:光學(xué)模塊采用**殷鋼(Invar)或碳化硅(SiC)**材質(zhì),其熱膨脹系數(shù)<×10??/℃,較傳統(tǒng)鋁合金降低90%以上。主動(dòng)溫控系統(tǒng):關(guān)鍵部件(如激光發(fā)射器)集成珀?duì)柼≒eltier)制冷器,將工作溫度穩(wěn)定在23±℃,消除內(nèi)部發(fā)熱導(dǎo)致的漂移。
即使儀器精度達(dá)標(biāo)、環(huán)境穩(wěn)定,操作人員的操作習(xí)慣和流程規(guī)范性也可能成為精度“短板”,主要包括:儀器安裝與固定方式未找正基準(zhǔn):安裝儀器時(shí),若未確保儀器的定位基準(zhǔn)(如軸線、貼合面)與法蘭的實(shí)際軸線平行,或未將儀器固定牢固(如吸附底座未吸緊、支架未鎖死),會(huì)導(dǎo)致測(cè)量基準(zhǔn)偏移;探頭位置不當(dāng):若激光探頭與法蘭的距離過(guò)近(未達(dá)到儀器比較好測(cè)量距離)或過(guò)遠(yuǎn)(超出激光束有效聚焦范圍),會(huì)導(dǎo)致光斑分辨率下降,角度計(jì)算誤差增大(例如某儀器比較好測(cè)量距離為,超出后精度從±°降至±°)。測(cè)量流程與參數(shù)設(shè)置未按向?qū)Р僮鳎翰糠謨x器需按“找正-預(yù)熱-采集-計(jì)算”的流程操作,若跳過(guò)預(yù)熱步驟(如儀器從低溫環(huán)境取出后直接測(cè)量),會(huì)因硬件未達(dá)到穩(wěn)定工作狀態(tài)導(dǎo)致精度偏差;參數(shù)設(shè)置錯(cuò)誤:若誤設(shè)置法蘭直徑、測(cè)量跨距等參數(shù)(如實(shí)際法蘭直徑1米,卻設(shè)置為),會(huì)導(dǎo)致角度計(jì)算時(shí)的“距離參數(shù)”錯(cuò)誤,直接得出錯(cuò)誤結(jié)果(例如角度偏差實(shí)際為°,計(jì)算后顯示為°)。數(shù)據(jù)采集與讀數(shù)時(shí)機(jī)采集時(shí)機(jī)過(guò)早:儀器剛完成安裝后,若立即采集數(shù)據(jù)(未等待激光束穩(wěn)定、電路噪聲平復(fù)),會(huì)導(dǎo)致數(shù)據(jù)波動(dòng);讀數(shù)方式錯(cuò)誤:部分儀器需旋轉(zhuǎn)法蘭360°采集多組數(shù)據(jù)取平均值。 角度偏差測(cè)量快速儀 3 秒出測(cè)量結(jié)果,檢測(cè)效率提升 60%。
漢吉龍SYNERGYS角度偏差測(cè)量低功耗儀在數(shù)據(jù)傳輸與應(yīng)用便捷性上展現(xiàn)出***性能,其**優(yōu)勢(shì)在于測(cè)量數(shù)據(jù)的實(shí)時(shí)傳輸能力,徹底打破傳統(tǒng)儀器數(shù)據(jù)滯后的局限。該儀器搭載穩(wěn)定的無(wú)線藍(lán)牙連接模塊,操作人員無(wú)需現(xiàn)場(chǎng)緊盯儀器顯示屏,只需通過(guò)平板電腦、智能手機(jī)等移動(dòng)設(shè)備,即可輕松建立連接,實(shí)時(shí)查看角度偏差數(shù)據(jù)的動(dòng)態(tài)變化,無(wú)論是在嘈雜的工業(yè)車間還是復(fù)雜的戶外作業(yè)場(chǎng)景,都能確保數(shù)據(jù)傳輸?shù)姆€(wěn)定性與時(shí)效性。更值得關(guān)注的是,儀器創(chuàng)新性融合了實(shí)時(shí)激光反饋技術(shù)與3D動(dòng)態(tài)視圖功能。在單次測(cè)量完成后,系統(tǒng)會(huì)基于采集到的精細(xì)數(shù)據(jù),自動(dòng)生成直觀的設(shè)備調(diào)整方案,3D動(dòng)態(tài)視圖能清晰還原設(shè)備當(dāng)前角度偏差狀態(tài),讓操作人員快速掌握問(wèn)題**。在后續(xù)設(shè)備調(diào)整過(guò)程中,儀器持續(xù)實(shí)時(shí)傳輸數(shù)據(jù),為操作人員提供即時(shí)指引,避免反復(fù)試錯(cuò)與多次測(cè)量,大幅減少調(diào)整耗時(shí),***提升整體工作效率,尤其適用于對(duì)精度與效率要求嚴(yán)苛的機(jī)械安裝、設(shè)備校準(zhǔn)等工業(yè)場(chǎng)景。 ASHOOTER角度偏差測(cè)量校準(zhǔn)儀 邊測(cè)邊校雙功能,提升設(shè)備精度。原裝進(jìn)口角度偏差測(cè)量?jī)x演示
AS高轉(zhuǎn)速角度偏差測(cè)量?jī)x 適配高速旋轉(zhuǎn)設(shè)備,角度檢測(cè)穩(wěn)定。專業(yè)級(jí)角度偏差測(cè)量?jī)x使用方法
AS法蘭角度偏差測(cè)量?jī)x自身的加工精度和安裝前的狀態(tài),會(huì)直接影響“測(cè)量基準(zhǔn)的真實(shí)性”,主要包括:法蘭自身加工誤差法蘭面平面度誤差:若法蘭加工時(shí)平面度不達(dá)標(biāo)(如存在凸起、凹陷),會(huì)導(dǎo)致儀器貼合面與法蘭實(shí)際密封面不重合,使測(cè)量的“角度”并非法蘭真實(shí)對(duì)接角度;法蘭軸線同軸度誤差:若法蘭與管道焊接時(shí)已存在軸線偏移,或法蘭自身存在橢圓度誤差,會(huì)導(dǎo)致測(cè)量時(shí)的“基準(zhǔn)軸線”并非實(shí)際工作軸線,進(jìn)而使角度偏差測(cè)量值失真。法蘭安裝前的預(yù)處理狀態(tài)表面清潔度:法蘭表面的銹跡、焊渣、油污未清理干凈,會(huì)導(dǎo)致儀器定位塊無(wú)法緊密貼合,形成“虛假基準(zhǔn)”;法蘭變形:法蘭運(yùn)輸或存儲(chǔ)時(shí)若發(fā)生碰撞變形(如法蘭面翹曲),會(huì)使實(shí)際對(duì)接角度與設(shè)計(jì)角度存在偏差,而儀器測(cè)量的是“變形后的角度”,若未先修正法蘭變形,會(huì)誤將“變形誤差”當(dāng)作“安裝誤差”。 專業(yè)級(jí)角度偏差測(cè)量?jī)x使用方法
- 多功能軸對(duì)中校準(zhǔn)測(cè)量?jī)x特點(diǎn) 2025-09-17
- 無(wú)線聯(lián)軸器對(duì)中服務(wù)特點(diǎn) 2025-09-17
- 自主研發(fā)角度偏差測(cè)量?jī)x 2025-09-17
- 常見(jiàn)聯(lián)軸器對(duì)中服務(wù)裝置 2025-09-17
- 無(wú)線振動(dòng)激光對(duì)中儀裝置 2025-09-17
- 耦合角度偏差測(cè)量?jī)x價(jià)格 2025-09-17
- 常見(jiàn)便攜同心度檢測(cè)儀公司 2025-09-17
- 10米激光對(duì)中服務(wù)供應(yīng)商 2025-09-17
- 多功能快速對(duì)中校正儀 2025-09-17
- 機(jī)械法蘭聯(lián)軸器對(duì)中儀用途 2025-09-17
- 貴州油液檢測(cè)預(yù)警系統(tǒng) 2025-09-17
- 徐州進(jìn)口金相顯微鏡調(diào)試 2025-09-17
- 品牌pH電極報(bào)價(jià)行情 2025-09-17
- 淮安制作沼氣流量計(jì)設(shè)計(jì) 2025-09-17
- 紹興工程機(jī)械在線檢測(cè)油液泡沫特性監(jiān)測(cè) 2025-09-17
- 山東測(cè)量用的大理石(花崗石/花崗巖)方尺/平尺/直角尺 2025-09-17
- 廣州水流量計(jì)供應(yīng)商 2025-09-17
- 廈門直讀三元催化銷售 2025-09-17
- 水罐雷達(dá)液位計(jì)市場(chǎng)報(bào)價(jià) 2025-09-17
- 無(wú)錫測(cè)量?jī)x介紹 2025-09-17